 Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions
Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions

The increasing demand for healthcare workers, driven by aging populations and labor shortages, presents a significant challenge for hospitals. Humanoid robots have the potential to alleviate these pressures by leveraging their human-like dexterity and adaptability to assist with medical procedures.
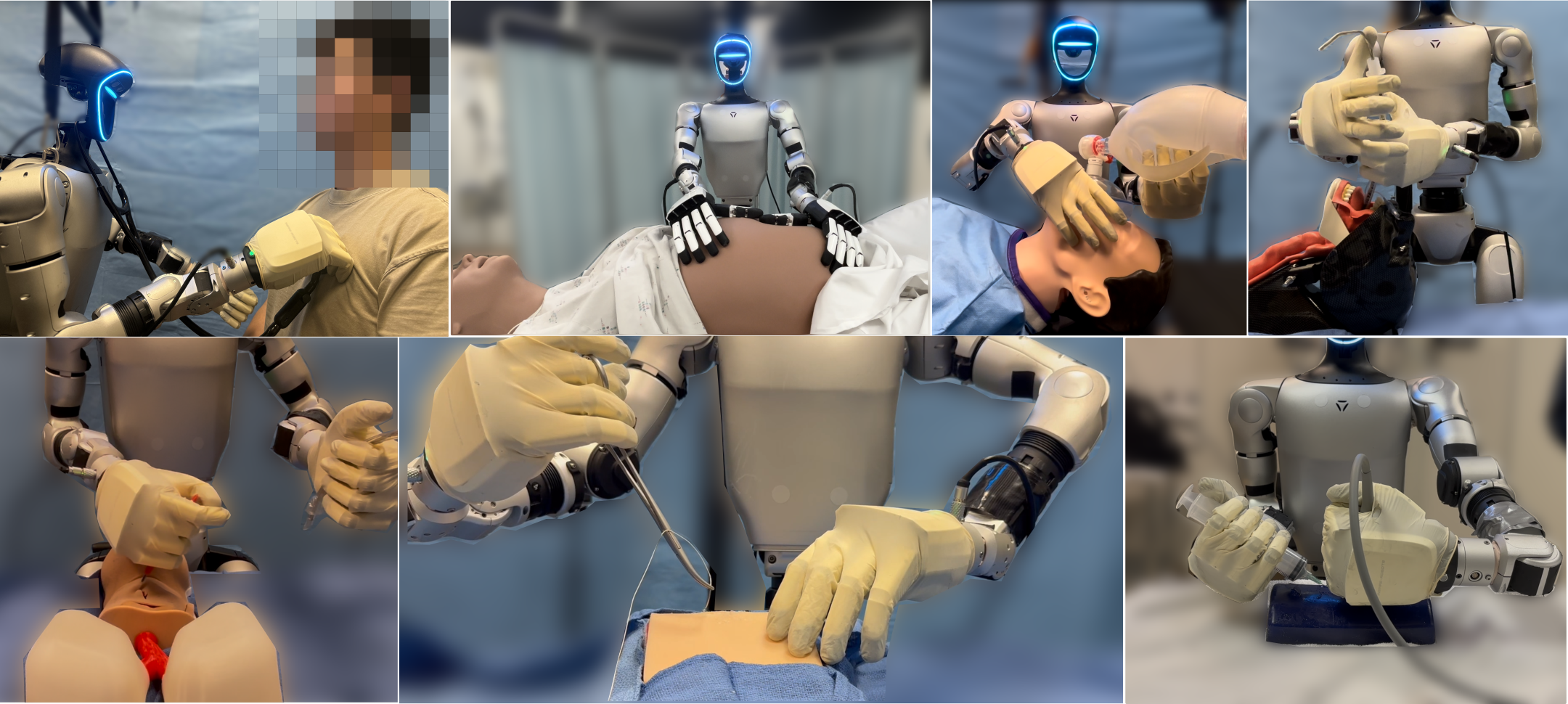
In this work, an exploratory study was performed into the feasibility of humanoid robots performing direct clinical tasks through teleoperation. A bi-manual teleoperation system was developed for the Unitree G1 Humanoid Robot, integrating high-fidelity pose tracking, custom grasping configurations, and an impedance controller to safely and precisely manipulate medical tools. The system is evaluated across seven diverse medical procedures, including physical examinations, emergency interventions, and precision needle tasks.
Our results demonstrate that humanoid robots can successfully replicate critical aspects of human medical assessments and interventions, with promising quantitative performance in ventilation and ultrasound-guided tasks. However, challenges remain, including limitations in force output for procedures requiring high strength and sensor sensitivity issues affecting clinical accuracy. This study highlights both the potential and current limitations of humanoid robots in hospital settings and lays the groundwork for future research in robotic healthcare integration.

Teleoperation system using HTC Vive trackers and a foot pedal (blue contours), with hand configurations re-targeted from webcam images to robot hands (green contours).
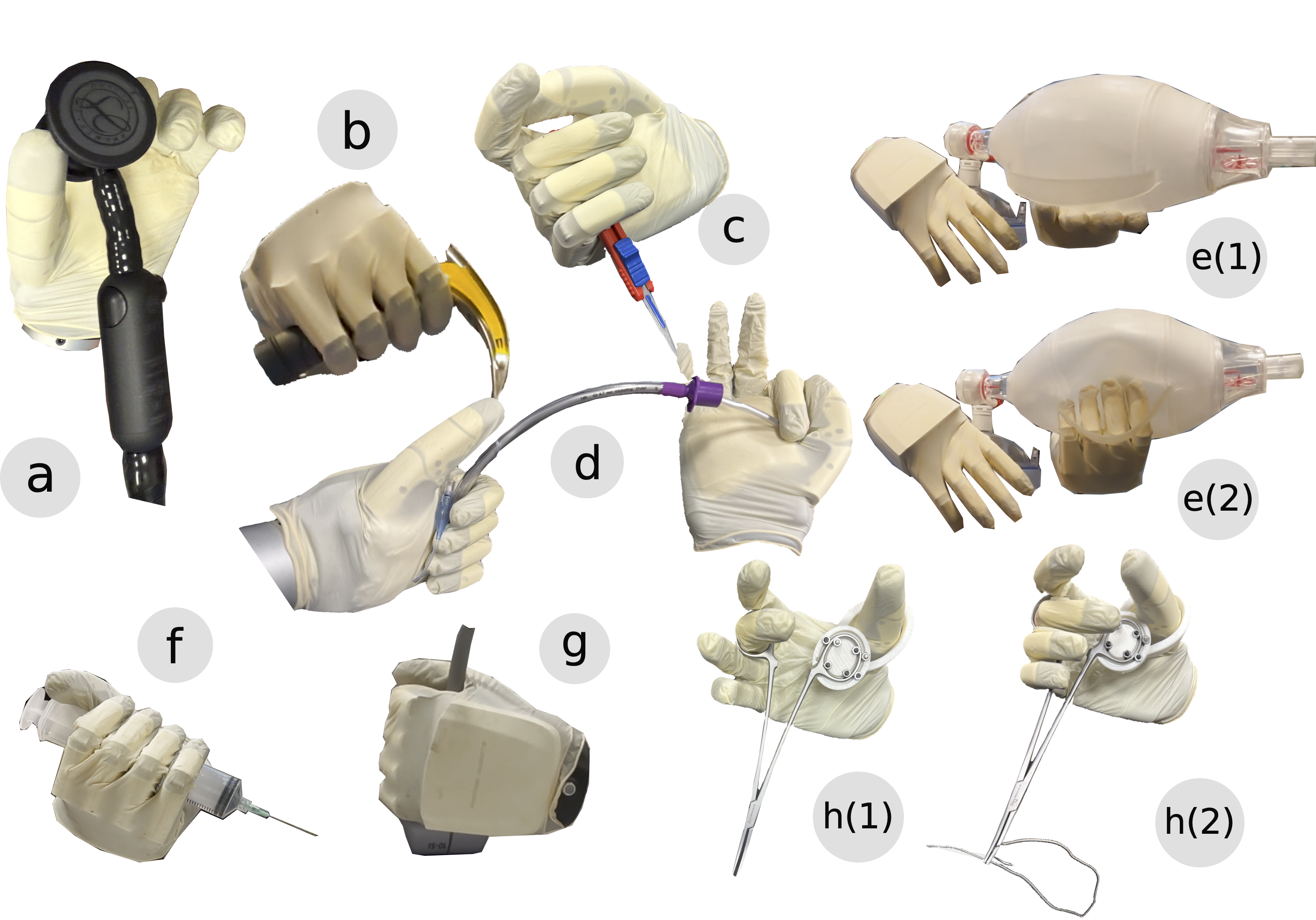
(a) Stethoscope, (b) Laryngoscope, (c) Scalpel, (d) Endotracheal tube (L) & Stylet (R), (e) BVM bag—open (1), squeezing (2), (f) Needle syringe, (g) Ultrasound probe, (h) Surgical clamp—opening (1), closing (2).
@misc{atar2025humanoidshospitalstechnicalstudy,
author = {Soofiyan Atar and Xiao Liang and Calvin Joyce and Florian Richter and Ricardo Wood and Charles Goldberg and Preetham Suresh and Michael Yip},
title = {Humanoids in Hospitals: A Technical Study of Humanoid Surrogates for Dexterous Medical Interventions},
year={2025},
eprint={2503.12725},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2503.12725},
}